Amortized probabilistic models for chemical microscopy
Can we used an amortized model to speed up inference in our droplet microscopy model?
My last go using a probabilistic model to analyze a microscope image seemed to work well enough, but I wanted to take a more flexible approach to modelling the appearance of droplets without having to roll out a more sophisticated physical model. Also, it seemed impractical to require a beefy GPU and minutes of compute for a single image.
I’ve been meaning to experiment with amortized inference a bit more recently. The idea is that instead of all latent variables being inferred, a small model (think a miniature multi-layer perceptron) is trained to predict a subset of these variables. We are interested in inferring droplet locations and compositions, not so much about rendering the droplets themselves. This approach can give the best of both worlds, a mechanistic interpretable model for the parts that we care about or are easy to reason about, and an data-driven, learned representation for the complex, inherently introspectable parts.
import jax
import jax.numpy as jnp
import jax.nn as jnn
import flax.linen as nn
import matplotlib.pyplot as plt
import numpy as np
import numpyro.distributions as dist
import seaborn as sns
from numpyro import deterministic, plate, sample
from numpyro.handlers import seed, trace, substitute
from numpyro.infer import SVI, Trace_ELBO, MCMC, NUTS
from numpyro.infer.autoguide import AutoNormal
from numpyro.optim import Adam
from PIL import Image
plt.rcParams['figure.dpi'] = 200
sns.set_theme(context='paper', style='ticks', font='Arial')We’ll use the same delightful microscope image as last time, part of the experiments that went into our latest paper.
img = Image.open('data/example.jpg')
img = img.resize((img.width // 4, img.height // 4))
img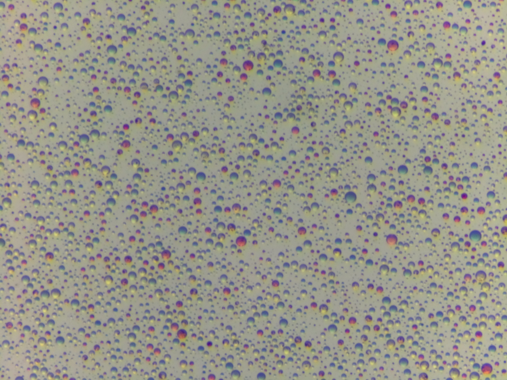
img = np.array(img) / 255.0class DropletOpticsModel(nn.Module):
hidden_dims: tuple = (32, 16, 8)
@nn.compact
def __call__(self, background, dx, dy, radius, composition):
"""
Args:
background: (batch, n_channels) - existing/background pixel values
dx: (batch, 1) - normalized distance from droplet center in x-direction
dy: (batch, 1) - normalized distance from droplet center in y-direction
radius: (batch, 1) - droplet radius
composition: (batch, n_composition_features) - droplet composition vector
Returns:
new_pixel_value: (batch, n_channels) - predicted new pixel values
"""
# Concatenate all input features
x = jnp.concatenate([background, dx, dy, radius, composition], axis=-1)
for i, dim in enumerate(self.hidden_dims):
x = nn.Dense(dim, name=f'hidden_{i}')(x)
x = nn.LayerNorm(name=f'ln_{i}')(x)
x = jnn.relu(x)
# Output layer - predict change in pixel values
delta = nn.Dense(background.shape[-1], name='output')(x)
# Add residual connection and apply sigmoid to keep values in [0, 1]
new_pixel_value = jnn.sigmoid(background + delta)
return new_pixel_value
# Initialize model
model = DropletOpticsModel()
# Test with dummy data
key = jax.random.PRNGKey(42)
batch_size, n_channels, n_composition = 32, 3, 10
dummy_background = jax.random.uniform(key, (batch_size, n_channels))
dummy_dx = jax.random.uniform(key, (batch_size, 1), minval=-1.0, maxval=1.0)
dummy_dy = jax.random.uniform(key, (batch_size, 1), minval=-1.0, maxval=1.0)
dummy_radius = jax.random.uniform(key, (batch_size, 1)) * 0.1 # Small radii
dummy_composition = jax.random.uniform(key, (batch_size, n_composition))
# Initialize parameters
print(f"{dummy_background.shape=}, {dummy_dx.shape=}, {dummy_dy.shape=}, {dummy_radius.shape=}, {dummy_composition.shape=}")
params = model.init(key, dummy_background, dummy_dx, dummy_dy, dummy_radius, dummy_composition)
# Test forward pass
output = model.apply(params, dummy_background, dummy_dx, dummy_dy, dummy_radius, dummy_composition)
print(f"Input background shape: {dummy_background.shape}")
print(f"Output pixel values shape: {output.shape}")
print(f"Output range: [{output.min():.3f}, {output.max():.3f}]")
# Print model summary
print(f"\nModel summary:")
print(model.tabulate(key, dummy_background, dummy_dx, dummy_dy, dummy_radius, dummy_composition))dummy_background.shape=(32, 3), dummy_dx.shape=(32, 1), dummy_dy.shape=(32, 1), dummy_radius.shape=(32, 1), dummy_composition.shape=(32, 10)
Input background shape: (32, 3)
Output pixel values shape: (32, 3)
Output range: [0.260, 0.897]
Model summary:
[3m DropletOpticsModel Summary [0m
┏━━━━━━━━━━┳━━━━━━━━━━━━━━━━┳━━━━━━━━━━━━━━━━┳━━━━━━━━━━━━━━━━┳━━━━━━━━━━━━━━━━┓
┃[1m [0m[1mpath [0m[1m [0m┃[1m [0m[1mmodule [0m[1m [0m┃[1m [0m[1minputs [0m[1m [0m┃[1m [0m[1moutputs [0m[1m [0m┃[1m [0m[1mparams [0m[1m [0m┃
┡━━━━━━━━━━╇━━━━━━━━━━━━━━━━╇━━━━━━━━━━━━━━━━╇━━━━━━━━━━━━━━━━╇━━━━━━━━━━━━━━━━┩
│ │ DropletOptics… │ - │ [2mfloat32[0m[32,3] │ │
│ │ │ [2mfloat32[0m[32,3] │ │ │
│ │ │ - │ │ │
│ │ │ [2mfloat32[0m[32,1] │ │ │
│ │ │ - │ │ │
│ │ │ [2mfloat32[0m[32,1] │ │ │
│ │ │ - │ │ │
│ │ │ [2mfloat32[0m[32,1] │ │ │
│ │ │ - │ │ │
│ │ │ [2mfloat32[0m[32,10] │ │ │
├──────────┼────────────────┼────────────────┼────────────────┼────────────────┤
│ hidden_0 │ Dense │ [2mfloat32[0m[32,16] │ [2mfloat32[0m[32,32] │ bias: │
│ │ │ │ │ [2mfloat32[0m[32] │
│ │ │ │ │ kernel: │
│ │ │ │ │ [2mfloat32[0m[16,32] │
│ │ │ │ │ │
│ │ │ │ │ [1m544 [0m[1;2m(2.2 KB)[0m │
├──────────┼────────────────┼────────────────┼────────────────┼────────────────┤
│ ln_0 │ LayerNorm │ [2mfloat32[0m[32,32] │ [2mfloat32[0m[32,32] │ bias: │
│ │ │ │ │ [2mfloat32[0m[32] │
│ │ │ │ │ scale: │
│ │ │ │ │ [2mfloat32[0m[32] │
│ │ │ │ │ │
│ │ │ │ │ [1m64 [0m[1;2m(256 B)[0m │
├──────────┼────────────────┼────────────────┼────────────────┼────────────────┤
│ hidden_1 │ Dense │ [2mfloat32[0m[32,32] │ [2mfloat32[0m[32,16] │ bias: │
│ │ │ │ │ [2mfloat32[0m[16] │
│ │ │ │ │ kernel: │
│ │ │ │ │ [2mfloat32[0m[32,16] │
│ │ │ │ │ │
│ │ │ │ │ [1m528 [0m[1;2m(2.1 KB)[0m │
├──────────┼────────────────┼────────────────┼────────────────┼────────────────┤
│ ln_1 │ LayerNorm │ [2mfloat32[0m[32,16] │ [2mfloat32[0m[32,16] │ bias: │
│ │ │ │ │ [2mfloat32[0m[16] │
│ │ │ │ │ scale: │
│ │ │ │ │ [2mfloat32[0m[16] │
│ │ │ │ │ │
│ │ │ │ │ [1m32 [0m[1;2m(128 B)[0m │
├──────────┼────────────────┼────────────────┼────────────────┼────────────────┤
│ hidden_2 │ Dense │ [2mfloat32[0m[32,16] │ [2mfloat32[0m[32,8] │ bias: │
│ │ │ │ │ [2mfloat32[0m[8] │
│ │ │ │ │ kernel: │
│ │ │ │ │ [2mfloat32[0m[16,8] │
│ │ │ │ │ │
│ │ │ │ │ [1m136 [0m[1;2m(544 B)[0m │
├──────────┼────────────────┼────────────────┼────────────────┼────────────────┤
│ ln_2 │ LayerNorm │ [2mfloat32[0m[32,8] │ [2mfloat32[0m[32,8] │ bias: │
│ │ │ │ │ [2mfloat32[0m[8] │
│ │ │ │ │ scale: │
│ │ │ │ │ [2mfloat32[0m[8] │
│ │ │ │ │ │
│ │ │ │ │ [1m16 [0m[1;2m(64 B)[0m │
├──────────┼────────────────┼────────────────┼────────────────┼────────────────┤
│ output │ Dense │ [2mfloat32[0m[32,8] │ [2mfloat32[0m[32,3] │ bias: │
│ │ │ │ │ [2mfloat32[0m[3] │
│ │ │ │ │ kernel: │
│ │ │ │ │ [2mfloat32[0m[8,3] │
│ │ │ │ │ │
│ │ │ │ │ [1m27 [0m[1;2m(108 B)[0m │
├──────────┼────────────────┼────────────────┼────────────────┼────────────────┤
│[1m [0m[1m [0m[1m [0m│[1m [0m[1m [0m[1m [0m│[1m [0m[1m [0m[1m [0m│[1m [0m[1m Total[0m[1m [0m│[1m [0m[1m1,347 [0m[1;2m(5.4 KB)[0m[1m [0m│
└──────────┴────────────────┴────────────────┴────────────────┴────────────────┘
[1m [0m
[1m Total Parameters: 1,347 [0m[1;2m(5.4 KB)[0m[1m [0mWhat ended up working in the end is when each pixel refers to its closest droplet for colour. Not ideal but it keeps the memory requirement manageable.
def tree_to_dists(tree, path=''):
if isinstance(tree, dict):
return {k: tree_to_dists(v, path + '/' + k) for k, v in tree.items()}
else:
# print(f"Sampling {path} with shape {tree.shape}")
return sample(path, dist.Normal().expand(tree.shape))def model_with_nn(img, n_droplets, types=10):
h, w, n_channels = img.shape
# Create coordinate grids
y_coords, x_coords = jnp.mgrid[:h, :w]
# Sample background per channel
with plate("channels", n_channels):
bg = sample("bg", dist.Uniform(0, 1).expand((n_channels,)))
# Sample droplet parameters
with plate("droplets", n_droplets):
x = sample("x", dist.Uniform(0, w))
y = sample("y", dist.Uniform(0, h))
r = sample("r", dist.LogNormal(0, 0.5))
with plate("types", types):
composition = sample("composition", dist.Uniform(0, 1)).T
model = DropletOpticsModel()
# Initialize background image
prediction = jnp.broadcast_to(bg, (h, w, n_channels))
nn_params = model.init(key,
jnp.zeros((h * w, n_channels)),
jnp.zeros((h * w, 1)),
jnp.zeros((h * w, 1)),
jnp.zeros((h * w, 1)),
jnp.zeros((h * w, types)))
nn_params = tree_to_dists(nn_params, path='nn_params')
distance = ((x_coords[..., None] - x) / r)**2 + ((y_coords[..., None] - y) / r)**2
nearest = jnp.argmin(distance, axis=-1)
# Calculate relative distances from droplet center
dx = (x_coords - x[nearest]) / r[nearest] # Normalized by radius
dy = (y_coords - y[nearest]) / r[nearest] # Normalized by radius
# Flatten spatial dimensions for neural network processing
dx_flat = dx.flatten()[:, None]
dy_flat = dy.flatten()[:, None]
r_flat = r[nearest].flatten()[:, None]
# Repeat background and composition for all pixels
bg_flat = prediction.reshape(-1, n_channels)
comp_flat = composition[nearest, :].reshape(-1, types)
# Apply neural network to get new pixel values
prediction = model.apply(nn_params, bg_flat, dx_flat, dy_flat, r_flat, comp_flat)
# Reshape back to image dimensions
prediction = prediction.reshape(h, w, n_channels)
prediction = jnp.clip(prediction, 0, 1)
prediction = deterministic('prediction', prediction)
diff = deterministic('diff', img - prediction)
sample('obs', dist.Normal(scale=0.05), obs=diff)
# print(f"{x_coords.shape=}, {y_coords.shape=}, {x.shape=}, {y.shape=}, {r.shape=}, {composition.shape=}, {distance.shape=}, {nearest.shape=}, {dx.shape=}, {dy.shape=}, {dx_flat.shape=}, {dy_flat.shape=}, {r_flat.shape=}, {bg_flat.shape=}, {comp_flat.shape=}, {prediction.shape=}")
return nn_paramstr = trace(seed(model_with_nn, 0)).get_trace(img, 1000, types=5)
nn_params = seed(model_with_nn, 0)(img, 1000, types=5)
{k: v['value'].shape for k, v in tr.items() if 'value' in v}{'channels': (3,),
'bg': (3,),
'droplets': (1000,),
'x': (1000,),
'y': (1000,),
'r': (1000,),
'types': (5,),
'composition': (5, 1000),
'nn_params/params/hidden_0/kernel': (11, 32),
'nn_params/params/hidden_0/bias': (32,),
'nn_params/params/ln_0/scale': (32,),
'nn_params/params/ln_0/bias': (32,),
'nn_params/params/hidden_1/kernel': (32, 16),
'nn_params/params/hidden_1/bias': (16,),
'nn_params/params/ln_1/scale': (16,),
'nn_params/params/ln_1/bias': (16,),
'nn_params/params/hidden_2/kernel': (16, 8),
'nn_params/params/hidden_2/bias': (8,),
'nn_params/params/ln_2/scale': (8,),
'nn_params/params/ln_2/bias': (8,),
'nn_params/params/output/kernel': (8, 3),
'nn_params/params/output/bias': (3,),
'prediction': (380, 507, 3),
'diff': (380, 507, 3),
'obs': (380, 507, 3)}guide = AutoNormal(model_with_nn)
svi = SVI(model_with_nn, guide, Adam(0.01), Trace_ELBO())
svi_result = svi.run(jax.random.PRNGKey(0), 100000, img, 800, types=3)
samples_svi = guide.sample_posterior(jax.random.PRNGKey(0), svi_result.params, sample_shape=(100,))
fig, ax = plt.subplots(figsize=(5, 2))
ax.plot(svi_result.losses)100%|██████████| 100000/100000 [08:35<00:00, 193.87it/s, init loss: 6371727.5000, avg. loss [95001-100000]: -854501.1250]
[<matplotlib.lines.Line2D at 0x721bf0302960>]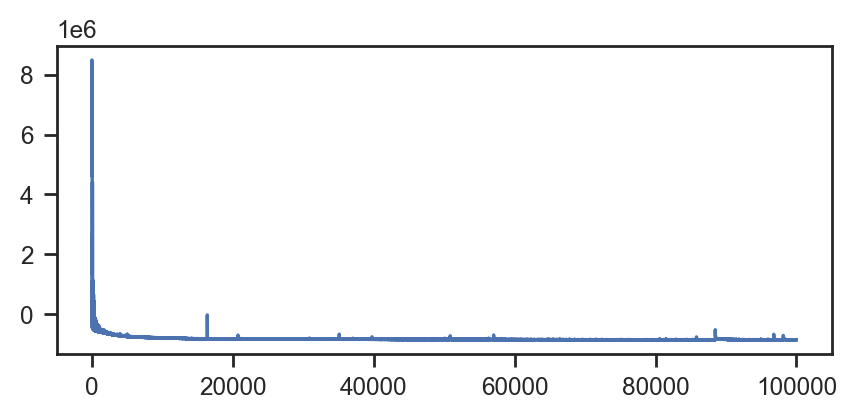
plt.imshow(samples_svi['prediction'].mean(axis=0))<matplotlib.image.AxesImage at 0x721cd022ff80>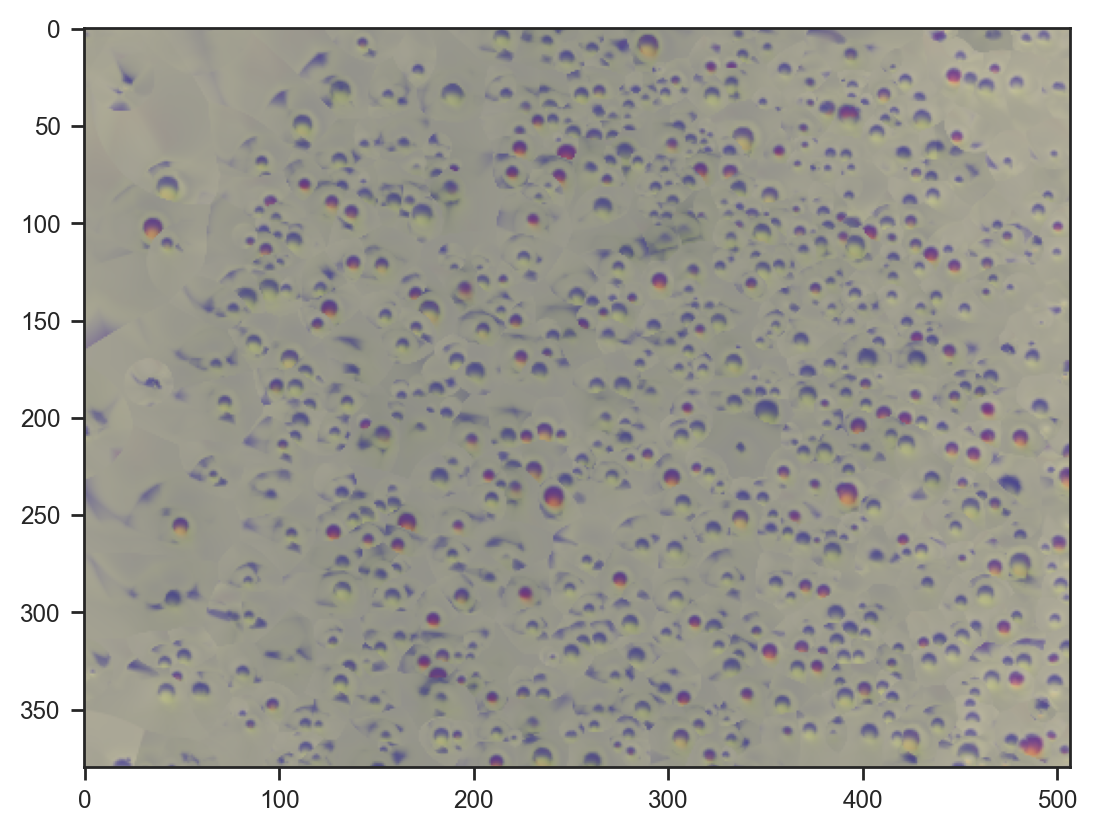
Not a bad reconstruction, and this time we capture color as well.
samples_svi['composition'][:1].shape(1, 3, 800)plt.imshow(img)
plt.scatter(samples_svi['x'][0], samples_svi['y'][0], s=4, alpha=1.0, c=samples_svi['composition'][0].T, marker='x')<matplotlib.collections.PathCollection at 0x721c10238f80>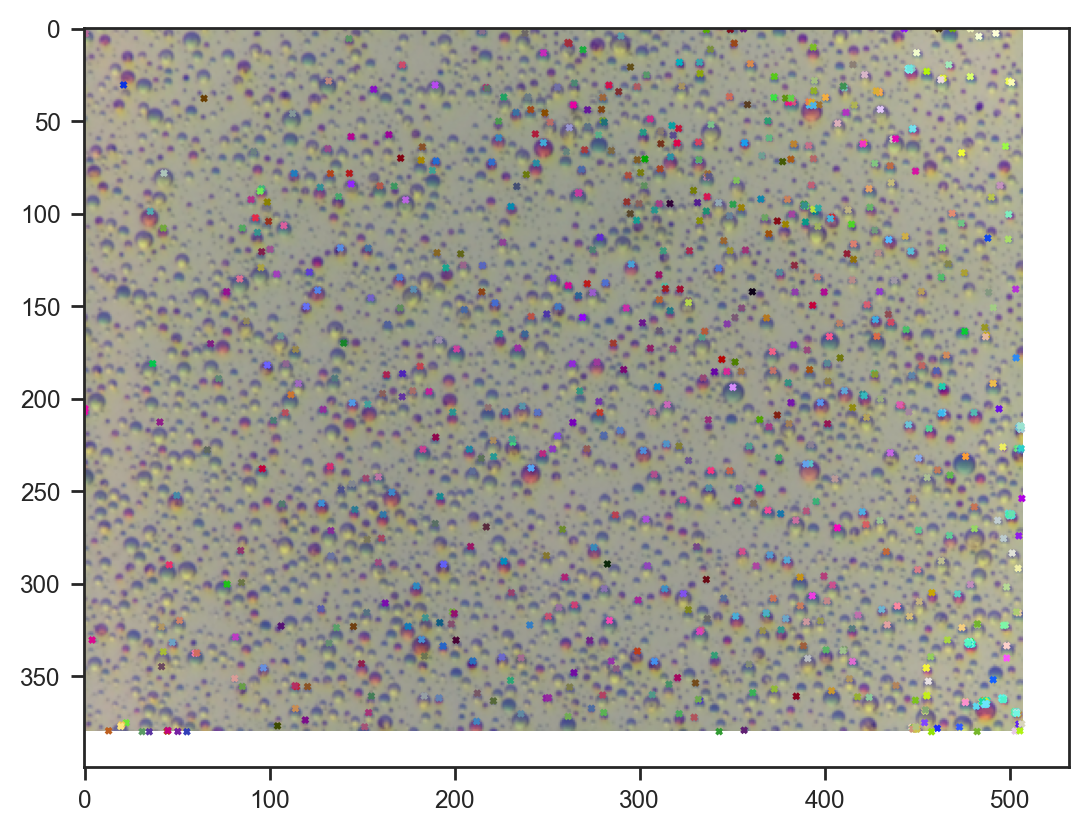
Droplet composition seems nicely consistent with the image.
Other attempts
A couple of other approaches that didn’t quite work.
Fully flattened model with aggregation
Two issues: memory use and how to aggregate the results at the end.
def model_with_nn(img, n_droplets, types=10):
h, w, n_channels = img.shape
# Create coordinate grids
y_coords, x_coords = jnp.mgrid[:h, :w]
# Sample background per channel
with plate("channels", n_channels):
bg = sample("bg", dist.Uniform(0, 1).expand((n_channels,)))
# Sample droplet parameters
with plate("droplets", n_droplets):
x = sample("x", dist.Uniform(0, w))
y = sample("y", dist.Uniform(0, h))
r = sample("r", dist.LogNormal(0, 0.5))
with plate("types", types):
composition = sample("composition", dist.Uniform(0, 1)).T
model = DropletOpticsModel()
# Initialize background image
bg = jnp.broadcast_to(bg, (h, w, n_channels))
nn_params = model.init(key,
jnp.zeros((h * w, n_channels)),
jnp.zeros((h * w, 1)),
jnp.zeros((h * w, 1)),
jnp.zeros((h * w, 1)),
jnp.zeros((h * w, types)))
nn_params = tree_to_dists(nn_params, path='nn_params')
# Calculate relative distances from droplet center
dx = (x_coords[..., None] - x) / r # Normalized by radius
dy = (y_coords[..., None] - y) / r # Normalized by radius
# Flatten spatial dimensions for neural network processing
dx_flat = dx.flatten()[:, None]
dy_flat = dy.flatten()[:, None]
r_flat = jnp.broadcast_to(r, (h, w, n_droplets)).flatten()[:, None]
# Repeat background and composition for all pixels
bg_flat = jnp.broadcast_to(bg[:, :, None, :], (h, w, n_droplets, n_channels)).reshape(-1, n_channels)
comp_flat = jnp.broadcast_to(composition, (h * w, n_droplets, types)).reshape(-1, types)
# Apply neural network to get new pixel values
new_pixels = model.apply(nn_params, bg_flat, dx_flat, dy_flat, r_flat, comp_flat)
# Reshape back to image dimensions
new_pixels = new_pixels.reshape(h, w, n_channels)
# Update prediction (could be additive or replacement - using replacement here)
prediction = new_pixels
prediction = jnp.clip(prediction, 0, 1)
prediction = deterministic('prediction', prediction)
diff = deterministic('diff', img - prediction)
sample('obs', dist.Normal(scale=0.05), obs=diff)Iterative with
lax.scan
def model_with_nn(img, n_droplets, types=10):
h, w, n_channels = img.shape
# Create coordinate grids
y_coords, x_coords = jnp.mgrid[:h, :w]
# Sample background per channel
with plate("channels", n_channels):
bg = sample("bg", dist.Uniform(0, 1).expand((n_channels,)))
# Sample droplet parameters
with plate("droplets", n_droplets):
x = sample("x", dist.Uniform(0, w))
y = sample("y", dist.Uniform(0, h))
r = sample("r", dist.LogNormal(0, 0.5))
with plate("types", types):
composition = sample("composition", dist.Uniform(0, 1))
model = DropletOpticsModel()
# Initialize background image
prediction = jnp.broadcast_to(bg, (h, w, n_channels))
nn_params = model.init(key,
jnp.zeros((h * w, n_channels)),
jnp.zeros((h * w, 1)),
jnp.zeros((h * w, 1)),
jnp.zeros((h * w, 1)),
jnp.zeros((h * w, types)))
nn_params = tree_to_dists(nn_params, path='nn_params')
# For each droplet, compute its effect using the neural network
def apply_droplet(carry, droplet_params):
current_prediction = carry
x_i, y_i, r_i, comp_i = droplet_params
# Calculate relative distances from droplet center
dx = (x_coords - x_i) / r_i # Normalized by radius
dy = (y_coords - y_i) / r_i # Normalized by radius
# Flatten spatial dimensions for neural network processing
dx_flat = dx.flatten()[:, None]
dy_flat = dy.flatten()[:, None]
r_flat = jnp.full((h * w, 1), r_i)
# Repeat background and composition for all pixels
bg_flat = current_prediction.reshape(-1, n_channels)
comp_flat = jnp.broadcast_to(comp_i, (h * w, types))
# Apply neural network to get new pixel values
new_pixels = model.apply(nn_params, bg_flat, dx_flat, dy_flat, r_flat, comp_flat)
# Reshape back to image dimensions
new_pixels = new_pixels.reshape(h, w, n_channels)
return new_pixels, None
prediction, _ = jax.lax.scan(apply_droplet, prediction, (x, y, r, composition.T))
prediction = jnp.clip(prediction, 0, 1)
prediction = deterministic('prediction', prediction)
diff = deterministic('diff', img - prediction)
sample('obs', dist.Normal(scale=0.05), obs=diff)
return nn_params